
Место происхождения:
Китай
Фирменное наименование:
YOUNGYOU
Сертификация:
CE
Номер модели:
WPDC5
Контакт США
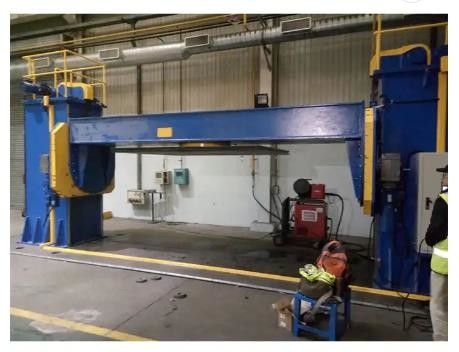





Рука робота позиционера автоматной сварки сваривая с позиционерами для сваривать
Внедрение продукции
Наш двойной сварочный манипулятор столбца с вращать, опрокидывающ, подниматься и низкопробная двигая система управления functionPLC может контролировать одновременный высокоточный подниматься. Один из столбца может bedesigned для того чтобы быть передвижное одним, оно может двинуть на рельс после принимать вне горизонтальное beam.it может работать со сваривая заграждением столбца манипулятора для совмещения центра автоматной сварки, thatcan большого улучшить сваривая эффективность и качество заварки. лт широко было использовано в boilers.petrochemical, судостроении, автомобиле, стали и много других индустрий. Isadvanced структура, ful-отличаемый, гибкий контроль прибора, легкий для того чтобы работать, улучшить качество сваривая andwelding автоматизации для того чтобы достигнуть идеального оборудования. Кроме двойного сварочного манипулятора столбца, мы также имеем l тип сварочный манипулятор, голову и tailwelding позиционер, тип сварочный манипулятор etc. c мы можем конструировать различный сварочный манипулятор согласовывая к различному workpiece или отростчатому требованию.
Как выбрать самым соответствующим локатор помогать роботом для вас
При выборе локатора помогать роботом, вам нужно сделать самое лучшее суждение основанное на вашей ситуации применения. И вам нужно рассматривать следующие пункты:
Насколько космоса необходимы для того чтобы приспособить роботы и локаторы?
Что геометрическая структура workpiece?
Те workpieces слишком большие или тяжелые для каждого индивидуального локатора?
Который локатор самый разумный?
Что требование производительности максимальной нагрузки?
Как только вы определяли локатор который наиболее хорошо отвечает ваши потребностямы основанные на этих пунктах, вы можете искать соответствующих моделей от продуктов различных изготовителей.

О компании
Наш ведущий брус сотрудничал с много международных известных брендов робота, как ABB KUKA FANUC Yaskawa UR. Включили компании, который главным образом включают palletizing, нагружать и разгружать. Нагрузка рядов ведущего бруса от 500kg к 5000kg. Длина ведущего бруса подгоняна согласно потребностям клиентов. Мы делали случай что робот ABB IRB6700 соответствует до 20 машин CNC, и 50m длинный ведущий брус завершает reciprocating движение, нагружая и разгружая робота. Число роботов значительно уменьшено и цена интеграции сохранена.
Наша компания также предлагает промышленные роботы на очень благоприятных ценах для того чтобы сделать заказ заказы совместно на более низких ценах.
Добро пожаловать к Шанхаю, Китаю, расследовать наши роботы и рельсы!
Поставка продукта компании
Робот ABB
Робот KUKA
Робот Yaskawa
Робот Fanuc
Робот UR
Cobot
Ведущий брус
Cobot сделало в Китае
Технические характеристики изделия
Таблица параметров продукта
Упаковка и транспорт
![]()
![]()
Отправьте ваше дознание сразу в нас



