
Место происхождения:
Китай
Фирменное наименование:
YOUNGYOU
Сертификация:
CE
Номер модели:
YYSC12
Контакт США



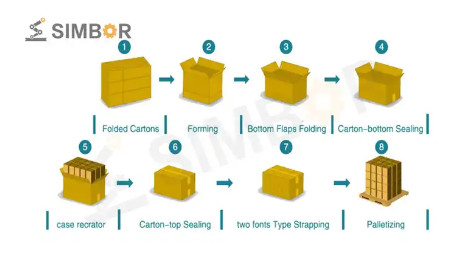
Пневматический gripper для паллета штабелируя и регулируя в производственной линии робота упаковывая
Типы аксессуаров и приспособлений механической руки можно разделить согласно их характеристикам использования:
①Всеобщее всеобщее приспособление. Например, тиски машины, цыплята, чашки всасывания, индексируя головы, и роторные верстаки имеют большую многосторонность и могут улучшать для того чтобы приспособиться к преобразованию обработки процессов и обработки объектов. Их структура была уточнена, и были изданы сериями их размеры и спецификации. Больший часть из аксессуаров механической руки стала стандартным аксессуаром для механических инструментов.
②Специализированные приспособления. Специально конструированный и изготовленный для зажимая потребностей некоторых частей продукта в некотором процессе, с целью конкретного вида обслуживания и сильной пертинентностью, обычно конструируемыми изготовителем продукта. Обыкновенно использованный для включения приспособлений токарного станка, приспособлений филировальной машины, сверля танцует джигу (приспособления механического инструмента используемые для того чтобы направить инструмент для того чтобы просверлить или ream отверстия на workpiece), расточка умирает (приспособления механического инструмента используемые для того чтобы направить оправку для расточки для того чтобы пробурить отверстия на workpiece), и сопровождающ приспособления (мобильные приспособления используемые для совмещенных линий механического инструмента автоматических).
③Регулируемое приспособление. Специализированное приспособление которое может заменить или отрегулировать компоненты.
④Приспособление комбинации. Приспособление составленное унифицированных компонентов различных форм, спецификаций, и польз, и робототехнического аксессуара руки соответствующее для продукции нового продукта пробной, одиночной части, небольшого серийного производства, и временных задач где продукты часто заменены.
![]()
О компании
Наш ведущий брус сотрудничал с много международных известных брендов робота, как ABB KUKA FANUC Yaskawa UR. Включили компании, который главным образом включают palletizing, нагружать и разгружать. Нагрузка рядов ведущего бруса от 500kg к 5000kg. Длина ведущего бруса подгоняна согласно потребностям клиентов. Мы делали случай что робот ABB IRB6700 соответствует до 20 машин CNC, и 50m длинный ведущий брус завершает reciprocating движение, нагружая и разгружая робота. Число роботов значительно уменьшено и цена интеграции сохранена.
Наша компания также предлагает промышленные роботы на очень благоприятных ценах для того чтобы сделать заказ заказы совместно на более низких ценах.
Добро пожаловать к Шанхаю, Китаю, расследовать наши роботы и рельсы!
Поставка продукта компании
Робот ABB
Робот KUKA
Робот Yaskawa
Робот Fanuc
Робот UR
Cobot
Ведущий брус
Cobot сделало в Китае
Технические характеристики изделия
Таблица параметров продукта
![]()
![]()
![]()
![]()
Упаковка и транспорт
![]()
![]()
Отправьте ваше дознание сразу в нас

