

2023-07-12
 Наша программа робота ABB главным образом состоит из 3 модулей модуля:
Наша программа робота ABB главным образом состоит из 3 модулей модуля:
1. Admin
2. программа действий машины специфическая (мы вызываем ее работа)
3. напишите RegPos (используемое как отметка после исполнять специфическое положение в работе)
В вышеуказанной части программы, мы главным образом доработали модуль 2module, который включает много работ, и каждая работа специфическая программа которая снабжает движение положения робота.
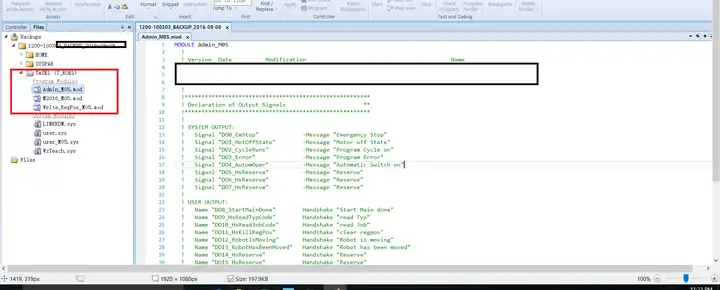
Любая программа имеет пункт входа программы, и поэтому сделайте программы робота. И вход к нашей программе робота в программе Admin. Исходный код программы Admin основной () следующим образом. Пожалуйста примечание которому мы видели PROC основное (). Блок программирования для роботов ABB процедура, сокращенная как PROC. Основная процедура для этой программы Admin по существу после создания новой машины:
PROC основное ()
СОЕДИНИТЕ fTCPSpeedHigh С IGenRobotMoving;
СОЕДИНИТЕ fTCPSpeedLow С IGenRobotMoving;
ISignalAO virt_TCPSpeed_Robot1, AIO_ABOVE_HIGH, 0,02, 0, 0, fTCPSpeedHigh;
ISignalAO virt_TCPSpeed_Robot1, AIO_BELOW_HIGH, 0,015, 0, 0, fTCPSpeedLow;
ЕСЛИ OpMode () =OP_MAN_PROG ТОГДАШНЕЕ
TPErase;
TPReadFK FunkTaste, «отборные работы движения ручным режимом? », "", "", "", «нет», «да»;
ЕСЛИ FunkTaste=5 ПОСЛЕ ЭТОГО
Руководство;
ЕЩЕ
TPErase;
TPWrite «робот двигая в ручной режим»;
TPWrite «сообщение с Мастер-PLC»;
ENDIF
ЕЩЕ
TypNum: =0;
JobNum: =0;
Funktaste: =0;
ENDIF
Выступите с инициативой;
SpeedLimiter;
pStartingPoint: =CRobT (инструмент: =tool0 WObj: =wobj0);
regStartingAngleX: =EulerZYX (x, pStartingPoint.rot);
regStartingAngleY: =EulerZYX (y, pStartingPoint.rot);
regStartingAngleZ: =EulerZYX (z, pStartingPoint.rot);
regStoppedAngleX: =EulerZYX (x, pPointAtStop.rot);
regStoppedAngleY: =EulerZYX (y, pPointAtStop.rot);
regStoppedAngleZ: =EulerZYX (z, pPointAtStop.rot);
ЕСЛИ (pPointAtStop.trans.X>= (pStartingPoint.trans.X+regTransDiff) ИЛИ
pPointAtStop.trans.X pPointAtStop.trans.Y>= (pStartingPoint.trans.Y+regTransDiff) ИЛИ<>
pPointAtStop.trans.Y pPointAtStop.trans.Z>= (pStartingPoint.trans.Z+regTransDiff) ИЛИ<>
pPointAtStop.trans.Z (regStoppedAngleX>=<>
(regStartingAngleX+regRotDiff) ИЛИ
regStoppedAngleY>=<>
regStoppedAngleX (regStartingAngleY+regRotDiff) ИЛИ
regStoppedAngleZ>=<>
regStoppedAngleY (regStartingAngleZ+regRotDiff) ИЛИ
regStoppedAngleZ<>
pPointAtStop.robconfpStartingPoint.robconf ПОСЛЕ ЭТОГО<>
Установите DO13_RobotHasBeenMoved;
ENDIF
ПОКА di8_HsStartMain=0 ДЕЛАЮТ
SetGO DO32_39_HsStepCode, 0;
WaitDI DI10_ReadJobCode, 1;
VelSet DI40_47_Override, 7500; ! Скорость установила на максимальное
SetGO DO24_31_HsJobCode, DI24_31_JobCode;
SetDO DO10_HsReadJobCode, 1;
WaitDI DI10_ReadJobCode, 0;
SetDO DO10_HsReadJobCode, 0;
! Звонок Jobprogram
CallByVar «работа», DI24_31_JobCode;
ENDWHILE
ENDPROC
Эта программа бит длиной, и я не хочу вводить его слишком много. Я главным образом хочу говорить о последнем разделе программы, потому что этот раздел вставка как робот вызывает программу работы во втором модуле двигая свое положение. Я думаю что это также чего большинство людей которые хотят учить о программах робота хотят для того чтобы знать и понимать большую часть:
Во первых, первое предложение ПОКА di8_ HsStartMain=0 ДЕЛАЮТ
Рукопожатие „сделанная основа середин „DI8_HsStartMain“ примечания которое начала“
Это значит что когда сигнал HsStartMain Bool цифрового входного сигнала 0, он значит что основа не была начата пока. Нам нужно исполнить пока сделать для того чтобы завершить полностью код. Довольно немного кодов здесь, и я передам пример, как второе одно
WaitDI DI10_ ReadJobCode, 1; Смысл переменной «DI10_ReadJobCode» приписки рукопожатие «прочитанная работа» сигнала рукопожатия от PLC.
Одобряет, настолько как точно оно делает роботы исполнить различные работы? Не потревожьтесь, вот и все:
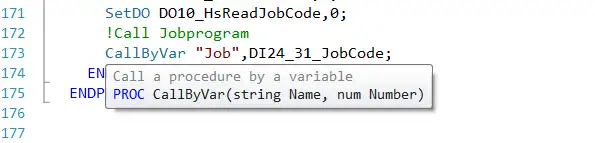
! Звонок Jobprogram как раз комментарий
CallByVar «работа», _JobCode DI24_ 31; Это предложение суть.
Отправьте ваше дознание сразу в нас

