

2023-07-12
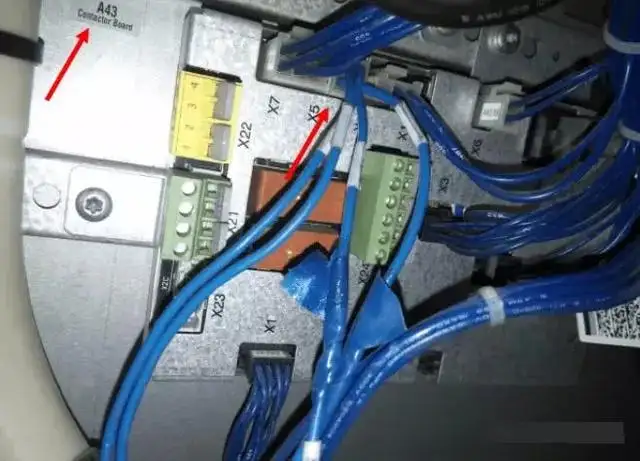
2. Регуляция недостатка короткого замыкания доски короткого замыкания модуля силы робота ABB
Человеческие факторы: Оперативно заменяя оборудование очень опасно, и много отказов монтажной платы причинены путем замена. Неправильные использование силы вводя карты и штепсельные вилки с силой могут причинить повреждение к интерфейсам, обломокам, etc., водя для того чтобы повредить к монтажной плате робота; По мере того как время использования повышений роботов, компоненты на монтажной плате робота естественно постареют, водящ к отказам монтажной платы робота.
Экологические факторы: Должный к неправильному обслуживанию оператором, монтажная плата робота покрыта с пылью, которая может причинить короткие замыкания сигнала.
3. Когда оно необходимый к резервным промышленным роботам
После первой силы дальше новой машины.
Перед делать все изменения.
3. После завершать изменения.
4. Если промышленные роботы важны, то они должны быть сделаны раз в неделю на регулярной основе.
5. Самое лучшее сделать подпорку на приводе USB также.
6. регулярно уничтожайте старые подпорки для того чтобы освободить вверх космос жесткого диска.
4. Как отрегулировать ситуацию куда робот включен и уча шкентель держит показать следующий интерфейс
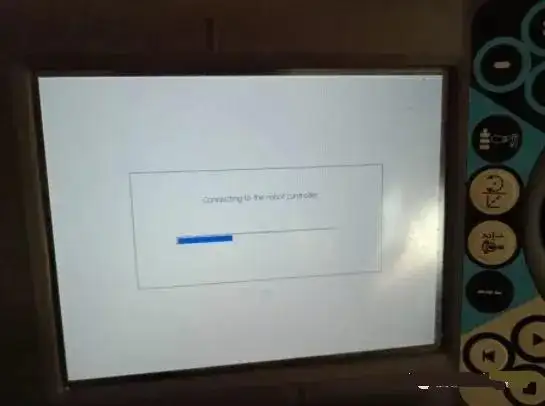 Вышеуказанная ситуация что никакое соединение связи установленное между уча шкентелем и главным регулятором робота, и причины для не устанавливать соединение для включения:
Вышеуказанная ситуация что никакое соединение связи установленное между уча шкентелем и главным регулятором робота, и причины для не устанавливать соединение для включения:
1. Хозяин робота небезупречен.
2. Встроенная карта CF (карта SD) хозяина робота небезупречна.
3. Кабель сети между уча шкентелем и хозяином свободен, etc.
Метод обработки: 1. Проверите ли хозяин нормален и ли карта SD в хозяине нормальна.
2. Проверите если кабель сети от уча шкентеля к хозяину соединен как следует.
5. Что смысл напоминания 10106 продолжительностей технического обслуживания когда робот показывает тревожное сообщение?
Эта ситуация напоминание периодического обслуживания робота ABB умное.
6. Как отрегулировать неисправность системы когда робот войдет в государство силы дальше?
1. Перезагружать робот раз.
Если не, проверите уча шкентель для более детальных подсказок сигнала тревоги и принять действие.
3. рестарт.
4. Если его все еще нельзя выпустить, то запуск b попытки.
5. Если он все еще не работает, то пожалуйста попробуйте запуск p.
6. Если он все еще не работает, то пожалуйста судите за я запуск (это возвратит робот в свои установки фабрики, быть осторожным).
7. Может подпорка робота быть поделена множественными роботами?
Но. например, подпорку робота a можно только использовать для робота a, не для робота b или c, по мере того как это может причинить отказы системы.
8. Какие файлы можно делить в подпорке робота?
Если 2 робота таких же модели и конфигурации. Вы можете делить БЫСТРУЮ программу и файл EIO, но после публикации, для этого также нужно быть подтверженным прежде чем его можно использовать нормально.
9. Что механическое начало роботов? Где механическое начало?
Каждый из 6 моторов сервопривода робота имеет уникальное фиксированное механическое начало. Неправильная установка начала робота механического причинит проблемы как ограниченное или неправильное движение робота, невозможности идти в прямую линию, и серьезного ущерба к роботу.
10. Как освободить сигнал тревоги контроля действия робота 50204?
1. Доработайте действие робота контролируя параметры (в меню контроля действия пульта управления) для того чтобы соответствовать обстановке на данный момент.
2. Используйте команду AccSet уменьшить ускорение робота.
3. уменьшите v в data_ скорости вариант ситовины.
11. Как отрегулировать сигнал тревоги «50296, разница в данным по памяти SMB» когда робот приводит в действие дальше в первый раз?
1. Отборная тарировка от меню ABB основного.
2. нажмите на дальше ROB_ 1. впишите экран тарировки и отборную память SMB.
3. отборные «предварительные», вписывают и нажимают на «ясную память шкафа контроля».
4. После завершать, нажмите на «близкую» и после этого нажмите на «обновление».
5. отборный „обменянный шкаф контроля или робототехническая рука, уточняя шкаф контроля с данными по памяти SMB“.
12. Как подгонять скорость движения траектории робота в БЫСТРОЙ программе?
1. Отборные данные по программы от основного меню уча шкентеля.
2. После обнаружения типа данных Speeddata, нажмите на новое.
3. нажмите на дальше исходную величину, и смыслы 4 переменных Speeddata являются следующими: v_ TCP представляет линейный ход суда робота, ситовины v_ представляет вращательную скорость робота, v_ Leax представляет линейную скорость обработки внешней оси, v_ Reax представляет вращательную скорость внешней оси. Если никакая внешняя ось, то последним 2 не нужно быть доработанным.
4. Подгонянные данные можно вызвать в БЫСТРОЙ программе.
13. Диагностика 6 общих недостатков в ремонте мотора сервопривода робота ABB
1. Как отрегулировать ошибку переполнения счетчика ошибки мотора во время высокоскоростного вращения?
Недостаток переполнения счетчика ошибки мотора происходит во время высокоскоростного вращения.
Противосредства 1: Проверите если проводка силового кабеля мотора и кабеля кодировщика правильна и если кабель поврежден.
Недостаток переполнения счетчика ошибки мотора происходит inputting длинный ИМП ульс команды.
Недостаток переполнения счетчика ошибки мотора произошел во время деятельности.
Противосредства 2: Увеличьте значение уровня переполнения устанавливая счетчика ошибки; Замедлите скорость вращения; Продлите время ускорения и торможения; Нагрузка слишком тяжела, и необходимо выбрать мотор более большой емкости с нуля или уменьшить нагрузку, и устанавливает организации передачи как редукторы для увеличения нагрузки.
2. Что должно быть сделано если оно не работает, то когда выход ИМПа ульс?
Наблюдайте текущую стоимость выхода ИМПа ульс регулятора и проблескивает ли свет выхода ИМПа ульс, подтвердите что ИМП ульс команды был выполнен и теперь выводит наружу нормально;
Проверите если кабель системы управления, силовой кабель, и кабель кодировщика от регулятора к водителю связаны проволокой неправильно, поврежденный, или в плохом контакте;
Проверите если тормоз мотора сервопривода с тормозом теперь был раскрыт;
Наблюдайте подтверждает ли панель водителя сервопривода входной сигнал команд ИМПа ульс;
, который побежали команда деятельности нормальна;
Форма контроля должна выбрать форму управления по направлению;
Тип набор входного импульса водителем сервопривода последовательным с установкой ИМПа ульс команды;
Обеспечьте что положительная сторона привод остановлен, сигнал вращения стопа привода стороны вращения, и inputted сигнал ошибки встречный переустановленный, нагрузка отключена, и деятельность нулевой нагрузки нормальна. Проверите механическую систему.
3. Чего должен я сделать если никакой отчет о перегрузки с нагрузкой?
Если оно происходит, то когда сигнал бега сервопривода соединен и никакой ИМП ульс не испущен:
Проверите проводку силового кабеля мотора сервопривода для того чтобы увидеть если любое плохое повреждение контакта или кабеля; Если это мотор сервопривода с тормозом, то тормоз необходимо повернуть дальше; Увеличение петли скорости установило слишком высоким; Константа объединенного времени петли скорости установила слишком небольшим.
Если сервопривод только работает неправильно во время деятельности:, то
Увеличение цепи азимута установило слишком высокий; Амплитуда располагать завершение установила слишком небольшим; Проверите если никакой запертый ротор на вале мотора сервопривода и отрегулируйте машинное оборудование с нуля.
4. Как общаться с анормалными звуками или вибрациями во время деятельности?
Проводка сервопривода:
Используйте унифицированные силовые кабели, кабели кодировщика, кабели системы управления, и кабели для проверки для повреждения; Проверите если источники взаимодействия около линии управления, и если они параллельны или тоже близко к близрасположенным сильнотоковым силовым кабелям; Проверите если любое изменение в потенциале клеммы замыкания на массу обеспечить превосходное зазмеление.
Параметры сервопривода:
Установка увеличения сервопривода слишком большая, и порекомендовано к вручную или активно регулирует параметры сервопривода с нуля; Подтверждающ установку константы времени фильтра ответа скорости, с исходной величиной 0, возможно увеличить установленное значение путем испытывать; Электронная установка коэффициента шестерни слишком большая, защищающ, что восстановил к установкам фабрики; Резонанс между системой сервопривода и механической системой, испытывая и регулируя частоту и амплитуду фильтра зазубрины.
Механическая система:
Соединение соединяя вал мотора и систему оборудования отклонило, и винты установки не были затягиваны; Плохой захват шкивов или шестерней может также привести к изменениям во вращающем моменте нагрузки. Деятельность нулевой нагрузки теста. Если деятельность нулевой нагрузки нормальна, то проверка если любая ненормальность в скрепляя части механической системы; Допустите ли инерция, вращающий момент, и скорость нагрузки слишком большой, тест деятельность нулевой нагрузки, и если деятельность нулевой нагрузки нормальна, то уменьшите нагрузку или замените водителя и мотора с более большой емкостью.
5. Как отрегулировать неточное управление ориентации и располагать во время ремонта мотора сервопривода робота ABB?
Во первых, подтвердите ли фактическое объявленное значение ИМПа ульс регулятора последовательно с ожидаемым значением, и если не, проверите и исправьте программу;
Наблюдайте соответствует ли число команд ИМПа ульс полученных водителем сервопривода одному объявленному регулятором. Если не, проверите кабель системы управления; Проверите если установка формы ИМПа ульс команды сервопривода последовательна с установкой регулятора, как CW/CCW или pulse+direction;
Установка увеличения сервопривода слишком большая, пожалуйста вручную или активно регулирует сервопривод для того чтобы приобрести с нуля; Мотор сервопривода прональн к аккумулированным ошибкам во время reciprocating движения. Порекомендованы, что устанавливает механический сигнал начала на режиме позволенный процессом, и выполняет поисковую работу начала прежде чем ошибка превышает позволенный масштаб; Механическая система сама имеет низкую точность или анормалную организацию передачи (как отступление соединения между мотором сервопривода и системой оборудования).
6. ремонт мотора сервопривода робота ABB, деятельность управления по направлению, недостаток overspeed сообщил. Как отрегулировать его?
Как только сигнал бега сервопривода будет соединен, он вызовет: проверите если проводка силового кабеля мотора сервопривода и кабеля кодировщика правильна и неповрежденна.
14. Как сделайте роботы ABB промышленные пройдите профилактическое обслуживание?
Перед нормальным функционированием «осмотра тормоза», необходимо проверить тормоз мотора каждой оси. Метод контроля для тормоза мотора следующим образом:
1. бег ось каждой робототехнической руки к своему положению максимальной нагрузки.
2. поворот переключатель выбора режима мотора дальше регулятор робота к позиции выключить МОТОРОВ.
3. Проверите если вал в своем исходном положении. Если механическая рука все еще поддерживает свое положение, то после того как мотор повернут, он показывает что тормоз в хорошем состоянии.
Опасность теряя функции деятельности торможения (250mm/s)
Не измените коэффициент шестерни или другие параметры движения от компьютера или уча шкентеля. Это повлияет на функцию деятельности торможения (250mm/s).
15. Несколько пунктов для того чтобы обратить внимание при использовании учебных пособий безопасно:
Позволяя кнопка прибора установленная на уча шкентель, отжиманный halfway, изменяет систему на МОТОРЫ НА режиме. Когда кнопка выпущена или полно отжата, системные изменения к МОТОРАМ С режима.
16. Для использования учебных пособий безопасного, следующими принципами необходимо следовать:
1.When позволяя кнопка прибора не может потерять свою функцию во время программирования или отлаживать, и роботу не нужно двинуть, немедленно выпустить позволяя кнопку прибора.
2. Когда программируя персонал вписывает безопасный район, они должен всегда носить уча шкентель на их теле для предотвращения других от двигать робот.
17. При работе внутри работая ряд робототехнической руки, следующими пунктами необходимо наблюдать:
1. Переключатель выбора режима регулятор необходимо включить к ручному положению для того чтобы привестись в действие позволяя прибор для того чтобы отключить компьютер или удаленно работать;
2. Когда переключатель выбора режима дальше
3. внимание оплаты к оси вращения робототехнической руки, быть осторожным когда волосы или одежда получат смешанными вверх. Также, внимание оплаты к другим выбранным компонентам или оборудование на робототехнической руке;
4. Проверите тормоз мотора каждой оси.
18. Отступление касания
Явление 1: Положение касанное пальцами не совпадает со стрелкой мыши.
Причина: После установки программы водителя, уча шкентель вертикально не касался центру положения яблочка во время тарировки.
Решение: Перекалибруйте положение.
Явление 2: Некоторые области имеют точное касание, пока другие имеют отступление в касании.
Причина: Большое количество пыль или масштаба аккумулируют на акустических нашивках отражения вокруг экрана касания поверхностной акустической волны, который влияет на передачу звуковых сигналов.
Решение: Очистите экран касания, обращая особое внимание очищать нашивки отражения звуковой войны со всех сторон экрана касания. Очищая, отключите электропитание контрольной карты экрана касания.
19. Уча привесное касание отсутствие ответа
Явление: Касаясь экрану, стрелки мыши не двигают и никакое изменение в положении.
Причина: Много причин для этого явления, следующим образом:
1. Пыль или масштаб аккумулированные на акустических нашивках отражения вокруг экрана касания поверхностной акустической волны очень серьезны, причиняющ экран касания не суметь работать;
2. неисправность экрана касания;
3. Контрольная карта экрана касания работала неправильно;
4. Сигнальная линия экрана касания работала неправильно;
5. Серийный порт неисправностей хозяина;
6. Операционная система уча шкентеля работала неправильно;
7. ошибка установки водителя экрана касания.
Решение: Наблюдайте индикаторной лампой сигнала экрана касания, которая проблескивает регулярно в нормальных условиях, приблизительно раз в секунду.
Касаясь экрану, уча шкентель идет черным, который комплексная проблема. Если осветите энергосберегающее контржурным светом установленный, черный экран нормален; Если второе слово в зоне контроля системы случайно эксплуатируется, то экран также пойдет черным. Если первые 2 пункта исключены, то обновление к самым последним микропрограммным обеспечениям для обзора.
Отправьте ваше дознание сразу в нас

